This page is about the loop closure detection approach used by RTAB-Map. For RGB-D mapping, visit introlab.github.io/rtabmap.
Loop closure detection is the process involved when trying to find a match between the current and a previously visited locations in SLAM (Simultaneous Localization And Mapping).
Over time, the amount of time required to process new observations increases with the size of the internal map, which may affect real-time processing.
RTAB-Map is a novel real-time loop closure detection approach for large-scale and long-term SLAM. Our approach is based on efficient memory management to keep computation time for each new observation under a fixed time limit, thus respecting real-time limit for long-term operation. Results demonstrate the approach's adaptability and scalability using two custom data sets and ten standard data sets.
</english><french>
Description
Cette page est à propos de l'approche de détection de fermeture de boucle utilisée dans RTAB-Map. Pour la cartographie RGB-D, visitez introlab.github.io/rtabmap.
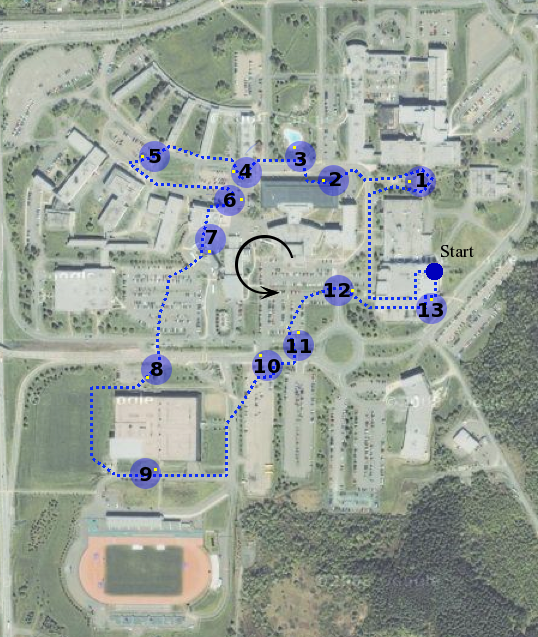
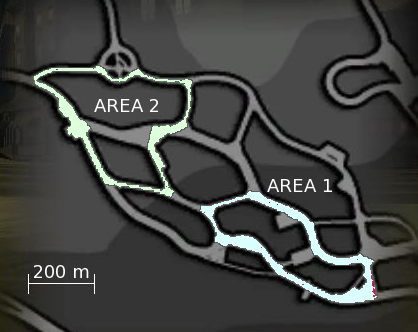
La détection de fermeture de boucle est le processus impliqué en SLAM (localisation et cartographie simultanées) lorsqu'on tente de trouver une correspondance entre un endroit présent et un autre déjà visité. Plus la carte interne augmente en taille, plus le temps requis pour la détection de fermeture de boucle augmente, ce qui peut affecter le traitement en temps réel. RTAB-Map est une nouvelle approche de détection de fermeture de boucle fonctionnant en temps réel pour du SLAM à grande échelle et à long terme. Notre approche est basée sur une gestion efficace de la mémoire afin de garder le temps de calcul en dessous d'un seuil de temps, respectant ainsi la limite de temps réel à long terme. En utilisant dix ensembles de données standards, notre propre ensemble de données dérivées d'un parcours de plus de 2 km rassemblant des conditions diverses et notre ensemble de données montrant un parcours où le robot visite les mêmes endroits une centaine de fois, les résultats démontrent l'adaptabilité et l'extensibilité de notre approche.
</french>
Eynsham70km.png 5519 images à ~1 Hz (Noter que nous avons enlevés des images de l'ensemble données original pour avoir une fréquence d'acquisition d'images d'environ 1 Hz.)
M. Labbé and F. Michaud, “Online Global Loop Closure Detection for Large-Scale Multi-Session Graph-Based SLAM,” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2014. (pdf) (IEEE Xplore)
Labbé, M., Michaud., F. (2013), “Appearance-based loop closure detection in real-time for large-scale and long-term operation,” IEEE Transactions on Robotics, vol. 29, no. 3, pp. 734-745. (pdf) (IEEE Xplore)
Labbé, M., Michaud, F. (2011), “Memory management for real-time appearance-based loop closure detection,” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. (pdf) (IEEE Xplore)






















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}