
Difference between revisions of "RTAB-Map"
| Line 16: | Line 16: | ||
</french> | </french> | ||
<center> | <center> | ||
| + | <code>{{#ev:youtube|71eRxTc1DaU}}</code> | ||
<code>{{#ev:youtube|CAk-QGMlQmI}}</code> | <code>{{#ev:youtube|CAk-QGMlQmI}}</code> | ||
<code>{{#ev:youtube|AMLwjo80WzI}}</code> | <code>{{#ev:youtube|AMLwjo80WzI}}</code> | ||
Revision as of 11:39, 13 April 2017
![]() RTAB-Map : Real-Time Appearance-Based Mapping
RTAB-Map : Real-Time Appearance-Based Mapping
Description[edit]
This page is about the loop closure detection approach used by RTAB-Map. For RGB-D mapping, visit introlab.github.io/rtabmap.
Loop closure detection is the process involved when trying to find a match between the current and a previously visited locations in SLAM (Simultaneous Localization And Mapping).
Over time, the amount of time required to process new observations increases with the size of the internal map, which may affect real-time processing. RTAB-Map is a novel real-time loop closure detection approach for large-scale and long-term SLAM. Our approach is based on efficient memory management to keep computation time for each new observation under a fixed time limit, thus respecting real-time limit for long-term operation. Results demonstrate the approach's adaptability and scalability using two custom data sets and ten standard data sets.
Results[edit]
Note that these results (more recent) may differ from those in the presentation video above...
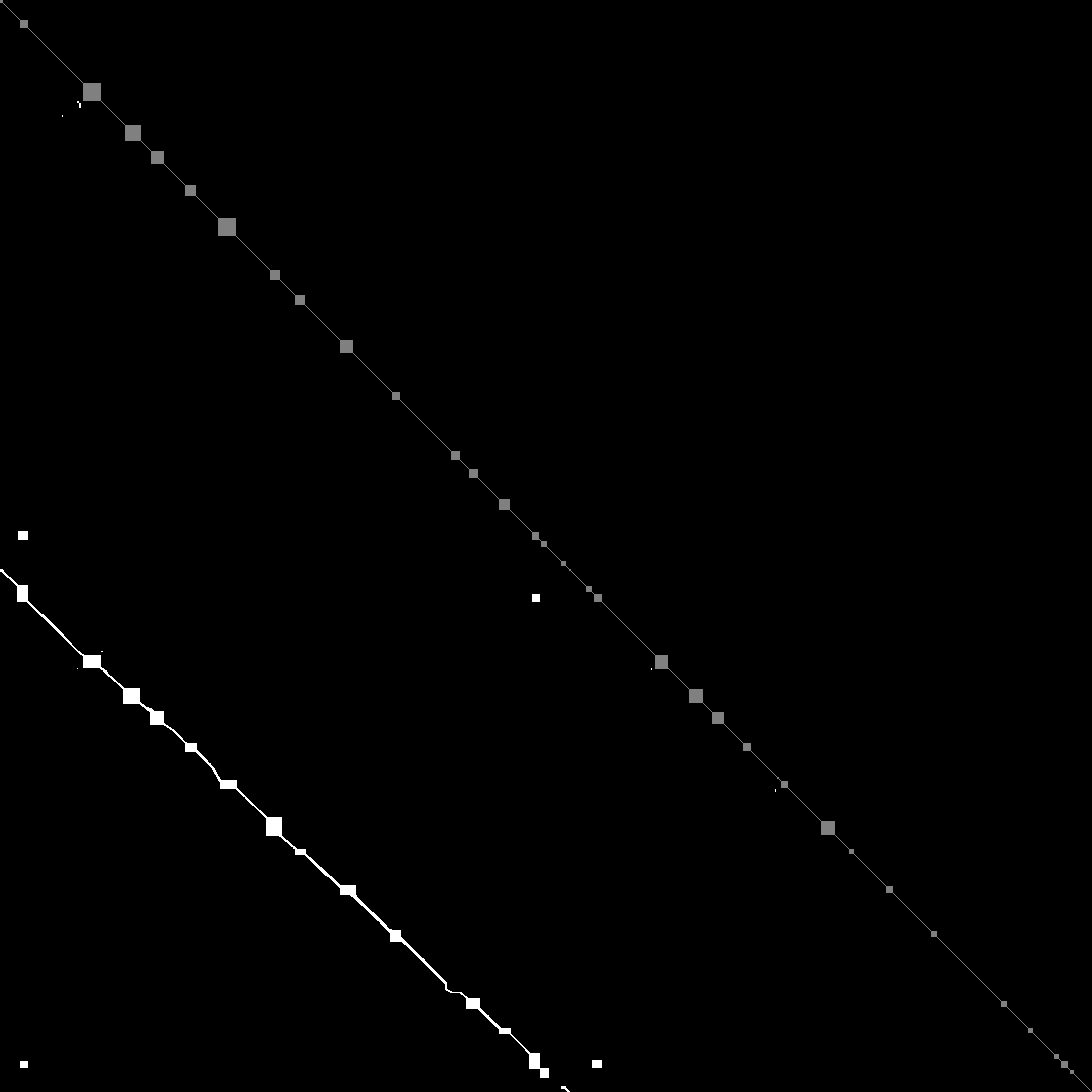
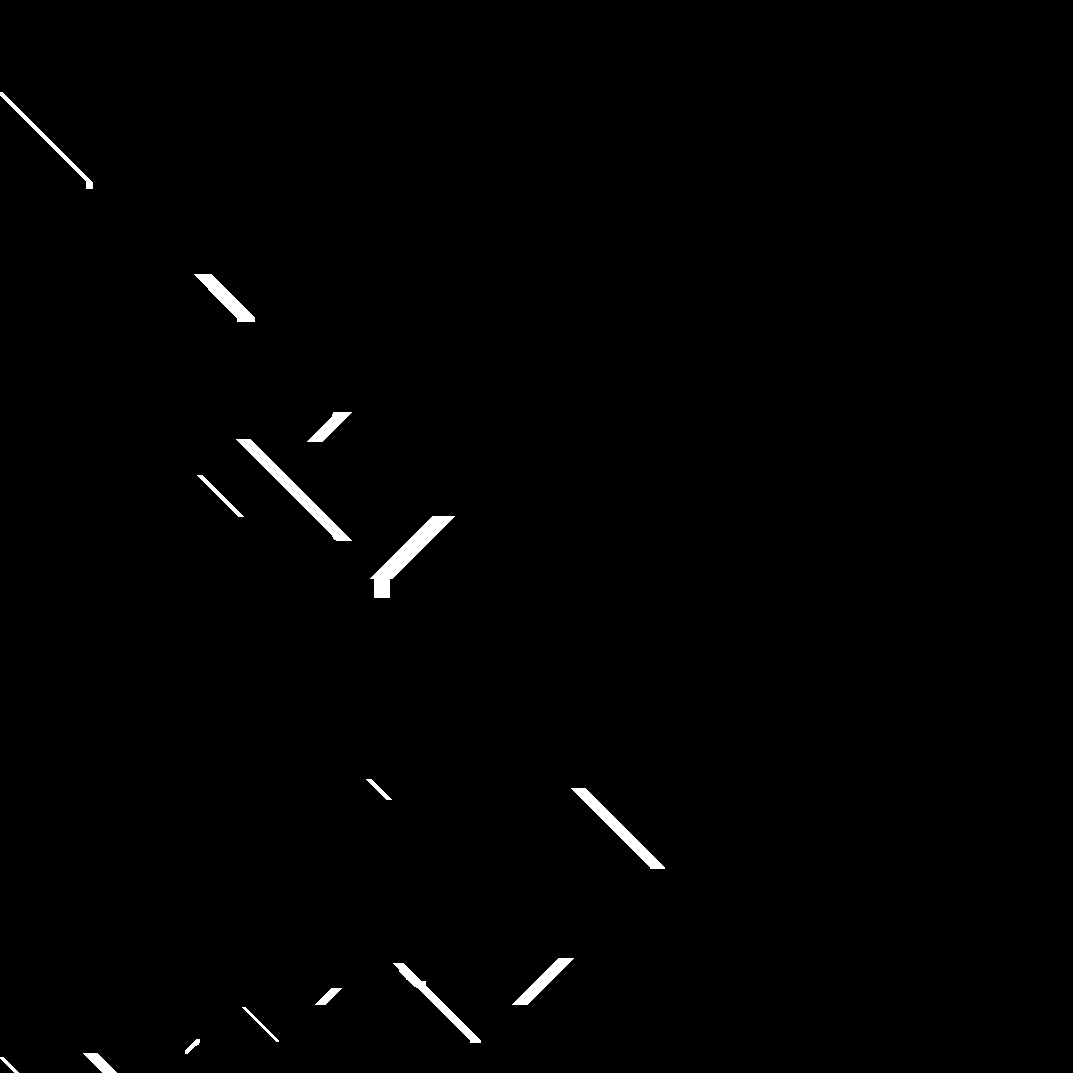
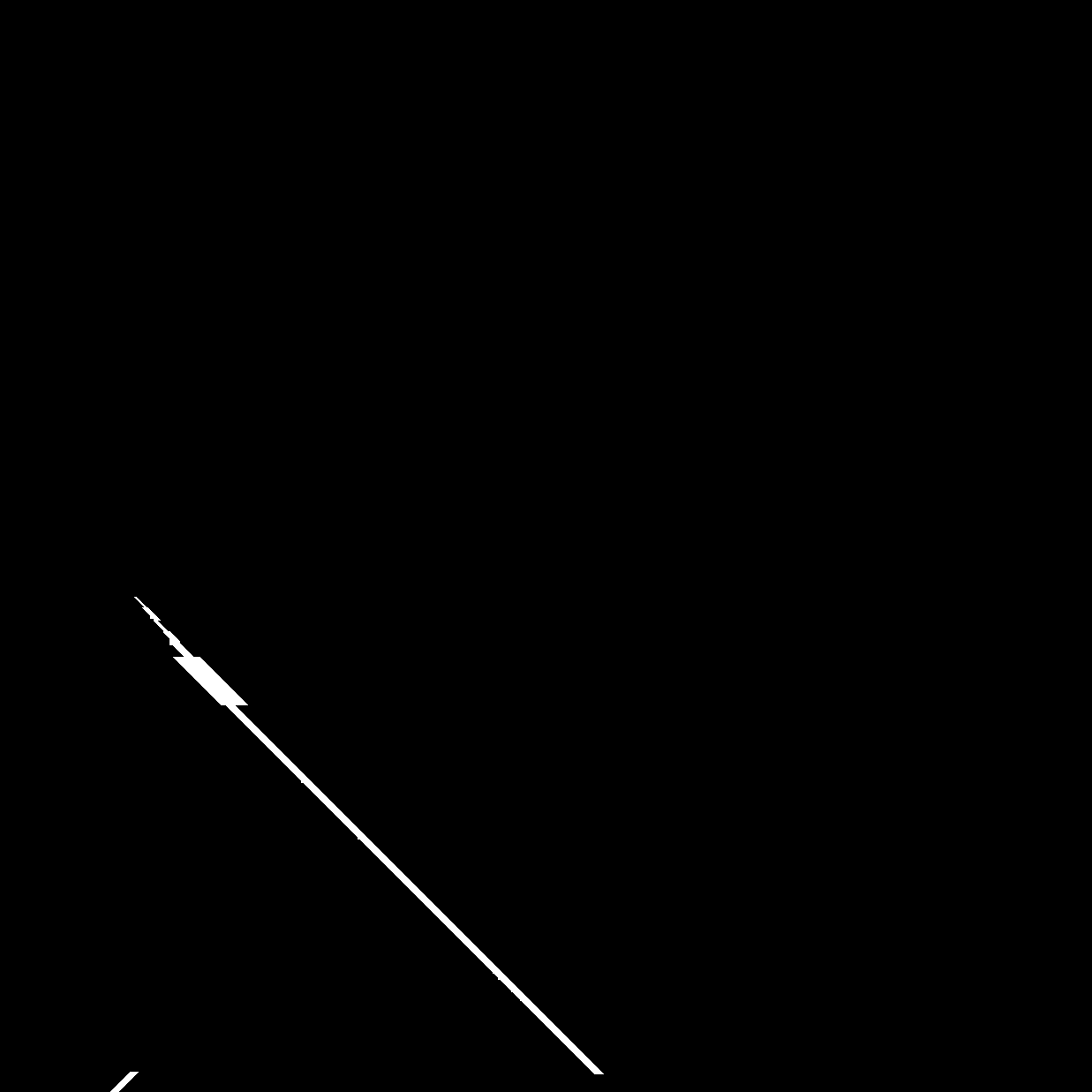
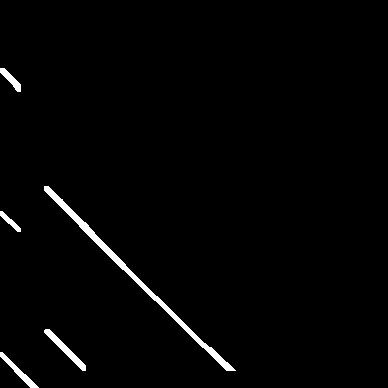
Figure 1: Summary of the loop closures detected on UdeS data set :
- Green : Loop closures detected
- Yellow : Loop closures rejected
- Red : Unable to detect a loop closure because old places could not be retrieved
Figure 2: Processing time for each image acquired (real-time limit fixed to 700 ms for an image rate of 1 Hz)
Figure 3: Precision-Recall (48% recall at 100% precision)



Reproduce the loop closure detection results

- Visit the Benchmark wiki page on RTAB-Map's GitHub. The ground truths can be downloaded below.
Videos
- Newer:
- Older:
Source code[edit]
The code was tested on Windows (Xp, 7), Mac OS X 10.6 and Ubuntu 10.4LTS.
- Standalone application, libraries and ROS packages : introlab.github.io/rtabmap

Data sets[edit]
UdeS
- 5395 images at 1 Hz (1.5 hours).
- Images taken while walking through a loop of ~2 km, traversed two times.
- The data set contains indoor and outdoor environments.









Rain!

Compare illumination and camera orientation with the next image...


Elevator door...

















UdeS_1Hz.part1.rar UdeS_1Hz.part2.rar UdeS_1Hz.part3.rar UdeS_1Hz GroundTruth
NFSMW
- 25098 images at 1 Hz (7 hours).
- Images taken from the racing video game Need For Speed: Most Wanted.
- 2 areas visited hundred times each (100 traversals in area 1 then moved to area 2 for another 102 traversals).






Compare illumination with the next image...














{kind=link}
NFSMW_1Hz.part01.rar NFSMW_1Hz.part02.rar NFSMW_1Hz.part03.rar NFSMW_1Hz.part04.rar NFSMW_1Hz.part05.rar NFSMW_1Hz.part06.rar NFSMW_1Hz.part07.rar NFSMW_1Hz.part08.rar
Community
Community data sets from other loop closure detection approaches :
- Angeli et al. : Lip6Indoor and Lip6Outdoor
- Cummins et al. (FAB-MAP) : NewCollege and CityCentre
- Cummins et al. (FAB-MAP 2.0) : Eynsham (70 km)
- Maddern et al. : NewCollege omnidirectionnal images
- Kawewong et al. (PIRF-Nav 2.0): CrowdedCanteen
- Ga ́lvez-Lo ́pez et al. : Bovisa and Bicocca
- Blanco et al. : Malaga 2009
Ground truths:
- NewCollege.png 1073 images at ~0.5 Hz (left and right images merged)
- CityCentre.png 1237 images at ~0.5 Hz (left and right images merged)
- Lip6Indoor.png 388 images at 1 Hz
- Lip6Outdoor.png 531 images at 0.5 Hz
- Eynsham70km.png 5519 images at ~1 Hz (Note that we removed some images of the original data set to have an approximately image rate of 1 Hz)
- NewCollegeOmni.png 1626 images at 1 Hz
- CrowdedCanteen.png 692 images at 2 Hz
- BicoccaIndoor-2009-02-25b.png 1757 images at 1 Hz
- BovisaOutdoor-2008-10-04.png 2277 images at 1 Hz
- BovisaMixed-2008-10-06.png 2147 images at 1 Hz
- malaga2009_campus_2L.png 653 images at ~1 Hz
- malaga2009_parking_6L.png 435 images at ~1 Hz
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publications
- M. Labbé and F. Michaud, “Online Global Loop Closure Detection for Large-Scale Multi-Session Graph-Based SLAM,” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2014. (pdf) (IEEE Xplore)
- Labbé, M., Michaud., F. (2013), “Appearance-based loop closure detection in real-time for large-scale and long-term operation,” IEEE Transactions on Robotics, vol. 29, no. 3, pp. 734-745. (pdf) (IEEE Xplore)
- Labbé, M., Michaud, F. (2011), “Memory management for real-time appearance-based loop closure detection,” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. (pdf) (IEEE Xplore)