
RoballRFDocumentation
From IntRoLab
Contents
Roball RF Documentation
Included with the kit :

- Roball (pink shell)
- 12V Charger
- USB RF-Interface
- 1/8" Audio cable (male-male)
Using Roball
Turning on Roball
- Turn on Roball with the switch indicated by the blue arrow. You should see a red led blinking when Roball is on.

Connecting to Roball with the RF Module
- Connect the RF Module to your USB port. With Linux, it is seen as a USB-Serial port and the device should be /dev/ttyUSB0.

- Start the Roball-RF GUI
- Select the right serial port and click on the "Connect" button.
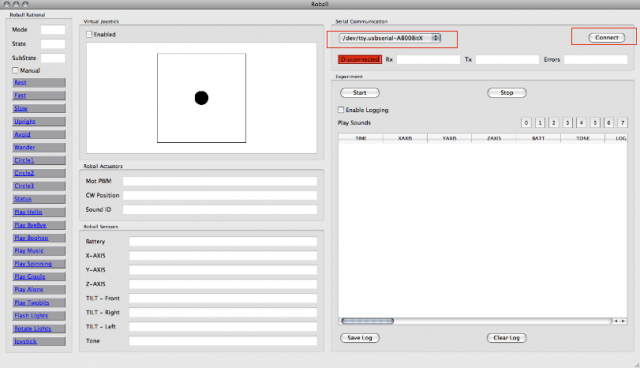
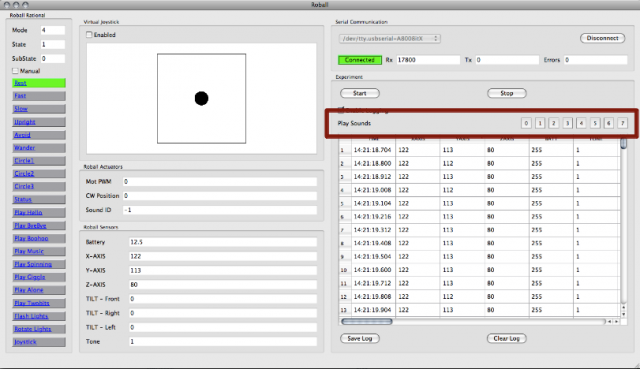
- Connection state should change to "Connected" and the state of the robot should be updated:
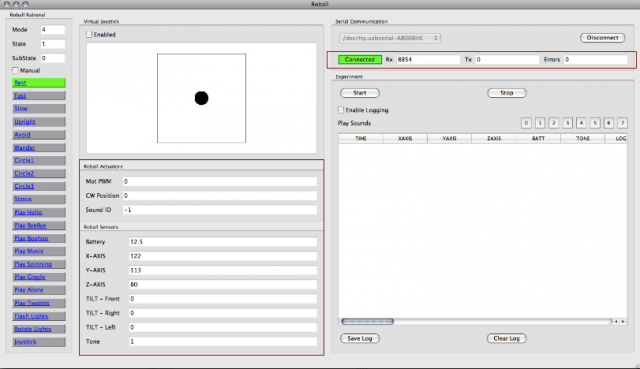
- You are now ready for operating Roball.



Recharging the battery
- Roball must be turned off before recharging. Use the provided 12V charger as shown here :

- Connect the charger to the power outlet and the charging plug to the right of the power on switch.

- Charging time should be around 4 hours. Led indicators on the charger tell the charging state.


Operating the robot
Virtual Joystick
- You can enable the virtual joystick by clicking on "Enabled" as shown in the next image.
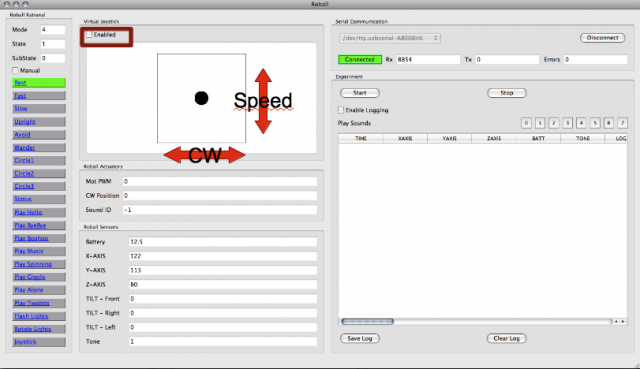
- Moving the handle (click & hold on the black circle) up and down will change Roball's speed.
- Moving the handle (click & hold on the black circle) left and right will change Roball's Counder Weight.
- You should see the "Joystick" behavior activated when the virtual joystick is enabled.

Activating Behaviors Manually
- Click on the "Manual" checkbox to activate control of manual behaviors as shown in the following image :
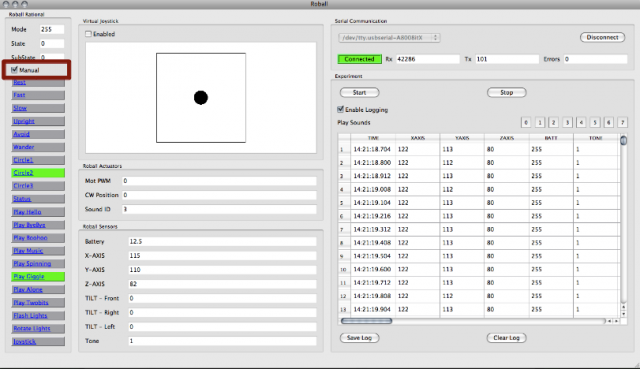
- Click on any behavior to toggle its state. Gray color means that the behavior is deactivated. Green color means that the behavior is active.

Behaviors priorities are the following :
- roball_behavior_CIRCLE1(duty, pos, sound_id); //MIN priority
- roball_behavior_CIRCLE2(duty, pos, sound_id);
- roball_behavior_CIRCLE3(duty, pos, sound_id);
- roball_behavior_WANDER(duty, pos, sound_id);
- roball_behavior_UPRIGHT(duty, pos, sound_id);
- roball_behavior_FAST(duty,pos,sound_id);
- roball_behavior_SLOW(duty,pos,sound_id);
- roball_behavior_AVOID(duty, pos, sound_id);
- roball_behavior_STATUS(duty, pos, sound_id);
- roball_behavior_PLAY_MUSIC(duty,pos,sound_id);
- roball_behavior_FLASH_LIGHTS(duty,pos,sound_id);
- roball_behavior_ROTATE_LIGHTS(duty,pos,sound_id);
- roball_behavior_REST(duty, pos, sound_id);
- roball_behavior_JOYSTICK(duty,pos,sound_id); //MAX priority
Starting Pre-Programmed Mode
Clicking the "Start" button when manual control of behaviors is disabled will start the pre-programmed mode. This mode is used by IntroLab for experiments. Clicking on the "Stop" button will stop the pre-programmed mode. Please contact Tamie Salter for more details.
July 2 2009 : The start and stop buttons are now invisible to avoid confusion.
Playing Recorded Audio Manually
- Click on the sounds buttons to play any of the 8 recorded sounds.

July 2 2009 : This section is now moved to the left side of the application
Logging data
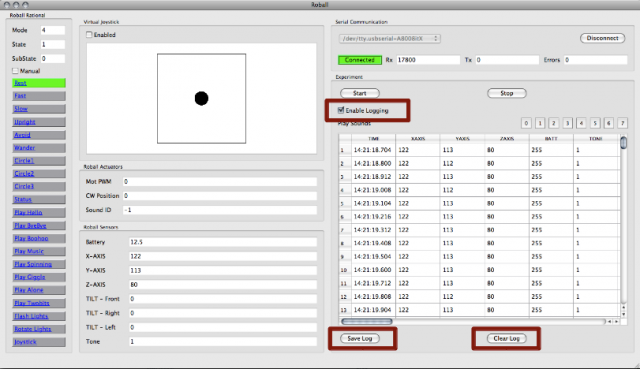
- Click on the "Enable Logging" button to add log data in the GUI Table View. Every log data coming from Roball (at 10Hz) will be inserted into the table as a single row.

Saving to a log file
- Click on the "Save Log" button to save the content of the table into a text file.

Clearing the Displayed Log
- Click on the "Clear Log" button to clear the log. Clearing the table can require few seconds if a lot of entries are present.
Changing the Audio Setup
- Connect the audio cable from your computer to Roball's audio jack. You need a cable with 1/8" male audio jack at both ends.(the one that connects to the phone jack of your computer)

- Turn on the robot if not already done.
- Start the Roball-RF GUI and connect to the robot.
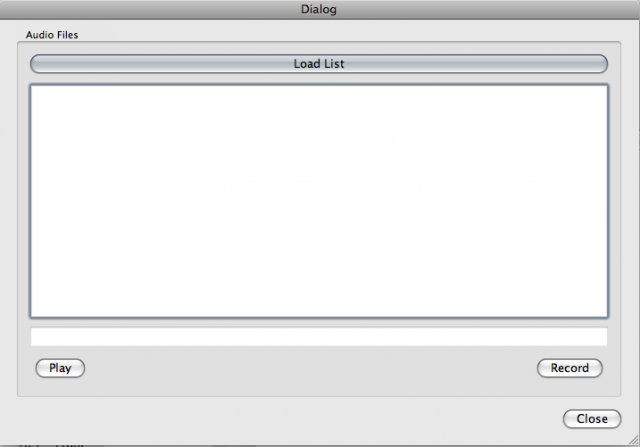
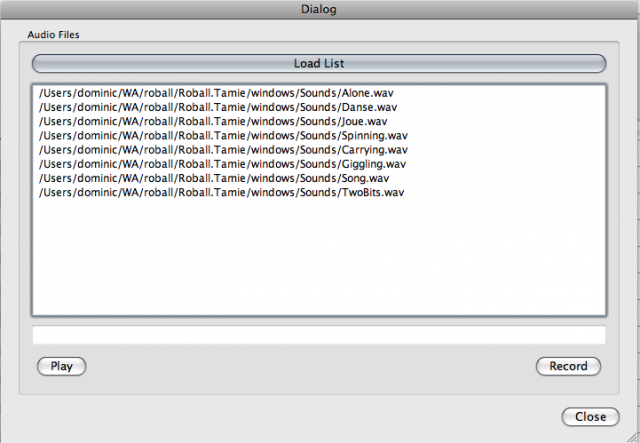
- In the application menu, click on Config->Audio Setup You should see the following dialog:
- Create a text file containing the list of audio files you want to use with Roball. Here is an example of configuration File:AudioSetup.txt. Use absolute path names for files. Audio files must be of type WAV, MP3 or AAC depending on your installation.Roball can record up to 8 audio files, lasting a maximum of 30 seconds each.
- Click on the "Load List" button and select the text file containing the file list. The dialog should now look like this :
- Make sure your volume is high enough.
- Click on the "Record" button. This will play audio files to the robot and send commands to Roball to record them in its internal audio memory. The red led on Roball should stop blinking during this step.
- Verify if the record worked by selecting any file on the list and clicking on the "Play" button. The audio should come out of Roball's speaker. If the audio is not loud enough, try raising the volume and go repeat the previous step.



Note : Audio configuration will be kept in Roball's memory, even after powering Roball down.